Jūs atrodaties šeit
Robotikas pielietojums lauksaimniecībā

Pēdējo piecu gadu laikā ir ievērojami attīstījušās inovācijas robotikas pielietojumā lauksaimniecības jomā. Lauksaimniecības robotikas mērķis ir palīdzēt nozarei uzlabot tās efektivitāti un procesu rentabilitāti. Citiem vārdiem sakot, mobilā robotika darbojas lauksaimniecības nozarē, lai uzlabotu produktivitāti, specializāciju un vides ilgtspēju.
Darbaspēka trūkuma dēļ pieaugošais patērētāju pieprasījums un augstās ražošanas izmaksas ir daži no faktoriem, kas ir paātrinājuši automatizāciju šajā nozarē ar mērķi samazināt izmaksas un optimizēt ražu. Vai zinājāt, ka pašlaik līdz pat 99% augu aizsardzības produktu tiek izniekoti, jo, strādājot ar vecu tehniku, bez precīzās lauksaimniecības sistēmām, tie pārklāj visu lauku vienveidīgi? Lauksaimniecības robotika spēj, piemēram, izsmidzināt pesticīdus tikai uz tiem augiem, kuriem tie ir nepieciešami. Šis ir tikai viens piemērs tam, ka ļoti konkrētus ieguvumus var redzēt nozarēs, kas tradicionāli nav īpaši automatizētas.
Bildes: https://www.postscapes.com/agriculture-robots/
Robotikas ieviešana lauksaimniecībā uzlabo gan produktivitāti, gan darba apstākļus lauksaimniekiem un strādniekiem. Inteliģentās sistēmas kļūst par ideālu risinājumu precīzās lauksaimniecības veicināšanai. Patlaban daudzas lauksaimniecības darbības jau tiek veiktas autonomi. Kā, piemēram, kooperatīvie roboti tagad tiek plaši izmantoti augļu ražas novākšanā vai biškopībā, kur mākslīgais intelekts nodrošina prognozēšanas datus, lai optimizētu saimniecības un plantācijas.
Lauksaimniecībā izmantojamo robotu veidi
Šie ir tikai daži robotikas pielietojumi lauksaimniecībā, kuros tiek izmantoti Robotnik roboti:
* Augu stāvokļa noteikšana un atbilstoša ķīmisko vielu lietošana, smidzināšana vai ražas novākšana atkarībā no augļu vai augu nogatavošanās stāvokļa.
* Mobilie manipulatori ar robotrokām (ražas novākšanai, augļu apstrādei).
* Lauksaimniekam noderīgas informācijas vākšana un pārveidošana.
* Selektīvā pesticīdu lietošana.
* Atlase, lai izvairītos no pārtikas atkritumu rašanās.
Pētniecība un izstrāde lauksaimniecības robotikas jomā
Kopš 2002. gada Robotnik ir piedalījies vairāk nekā 60 pētniecības projektos, no kuriem lielākā daļa ir Eiropas līmeņa projekti. Pašlaik tiek īstenoti aptuveni 30 dažāda rakstura projekti: daži no tiem ir orientēti uz loģistiku, citi – uz veselības nozari vai arī lauksaimniecības pārtikas ražošanas nozari. Tas dod iespēju izmantot viedus, autonomus un sadarbībai spējīgus mobilos robotus, kas ļauj izveidot efektīvākus rūpnieciskos procesus, labāk izmantojot resursus, kas kopumā nozīmē lielāku produktivitāti.
Piemēri par lauksaimniecības robotikas pētniecības un izstrādes projektiem, kuros iesaistīts Robotnik:
BACCHUS: Mobila robotu platforma aktīvai pārbaudei un ražas novākšanai lauksaimniecības platībās
Inteliģento robotizēto tehnoloģiju ieviešana lauksaimnieciskajā ražošanā ne tikai uzlabo produktivitāti, bet arī lauksaimnieku un strādnieku darba apstākļus. Inteliģentās sistēmas kļūst par risinājumu, kas virzās uz precīzo lauksaimniecību, bet daudzi lauksaimnieki jau pāriet uz pilnīgu autonomiju.
BACCHUS inteliģentā mobilā robotizētā sistēma sola atkārtot ar rokām veiktās ražas novākšanas operācijas, tajā pašā laikā atņemot roku darbu, autonomi darbojoties četros dažādos līmeņos:
* veicot robota navigāciju ar kvalitātes garantiju, lai pārbaudītu kultūraugus un vāktu datus no lauksaimniecības platības, izmantojot iebūvētu sensoru sistēmu,
* ar vajadzīgo precizitāti veikt ražas novākšanas operācijas, izmantojot modulāru robotizētu platformu,
* pielietojot aditīvo ražošanu, lai pielāgotu robota satvērēju dažādu kultūru ģeometrijai,
* uzlabotas kognitīvās spējas un lēmumu pieņemšanas prasmes.
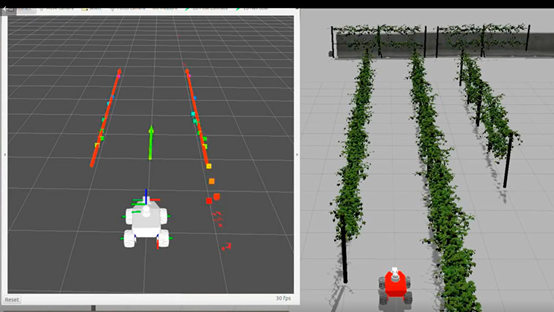
Šajā pētniecības un izstrādes projektā tiek izmantots autonomais mobilais robots RB-VOGUI ar divām pilnībā integrētām rokām. Šī platforma tiek izmantota, lai izstrādātu risinājumu vīnogu ražas novākšanai vīna dārzos.
AGROBOFOOD: Eiropas lauksaimniecības pārtikas nozares digitālā pārveidošana, izmantojot robotizētas tehnoloģijas
AGROBOFOOD mērķis ir paātrināt Eiropas lauksaimniecības pārtikas nozares digitālo pārveidi, izmantojot robotizētās tehnoloģijas. Tā konsolidēs, paplašinās un stiprinās pašreizējo ekosistēmu, izveidojot ilgtspējīgu DIH (digitālo inovāciju centru) tīklu. Tas veicinās robotizētu risinājumu ieviešanu lauksaimniecības un pārtikas nozarē: tas ir milzīgs izaicinājums, kam nepieciešama visaptveroša pieeja, iesaistot visus attiecīgos Eiropas dalībniekus.
Projekta kodolu veido inovācijas eksperimenti, kurus organizē un uzrauga DIHs. Atklātie uzaicinājumi 8 miljonu eiro apmērā piesaistīs papildu inovāciju eksperimentus un rūpnieciskos uzdevumus.
Robotnik vada eksperimentu, kura pamatā ir SUMMIT-XL āra mobilā platforma, kas aprīkota ar virkni sensoru, kurus izmantos, lai apkopotu informāciju no olīvu audzes vides, lai palielinātu olīvu ražu.
COROSECT: Kognitīvā robotizētā sistēma digitalizētām kukaiņu fermām
Salīdzinājumā ar citiem pārtikas avotiem gaļas ražošanai ir milzīga ietekme uz vidi, jo tā rada lielu ūdens patēriņu, noplicina zemi un rada lielas siltumnīcefekta gāzu emisijas. Paredzams, ka līdz 2050. gadam, pieaugot pasaules iedzīvotāju skaitam, pieprasījums pēc gaļas patēriņa palielināsies par 75%. Kukaiņu audzēšana varētu būt potenciāls ilgtspējīgs risinājums šai problēmai. Kukaiņi ir bagāti ar olbaltumvielām, taukskābēm un minerālvielām. Ēdami kukaiņi tiks apstiprināti ES kā jauns pārtikas produkts, kas var aizstāt gaļu bagātīgā un sabalansētā uzturā. Tomēr, ņemot vērā to neseno izmantošanu, joprojām ir jāpiemēro pētniecības un inovācijas stratēģijas, lai izstrādātu un standartizētu kukaiņu audzēšanas protokolus.
CoRoSect nodrošinās jaunu integrētu robotizētu risinājumu, kas ļaus optimizēt un paplašināt kukaiņu audzēšanas iekārtas. Projektā tiks izmantotas modernākās robotizētās iekārtas un mākslīgā intelekta tehnoloģijas, lai automatizētu ražošanu. Projekts koncentrējas uz ideju par dinamisku darba šūnu izveidi, kurās vienam “cilvēkstrādniekam” dažādos kukaiņu ražošanas posmos palīdzēs vairāki roboti, kas aprīkoti ar mākslīgā intelekta algoritmiem un viediem sensoriem. Kukaiņu audzēšanas automatizācija palielinās produktivitāti, uzlabos kvalitāti un samazinās ražošanas izmaksas.
CoRoSect tehniskā risinājuma pamatā būs Industry 4.0 arhitektūras modelis. Tiks izstrādāta industriālā kibernētiskā un fiziskā sistēma (ICPS), kas atbalstīs visus kukaiņu dzīves cikla posmus kukaiņu fermās. Sistēmas pamatmērķis būs aizstāt atkārtotus, bet arī kognitīvi un fiziski sarežģītus uzdevumus, piemēram, kastu pārvietošanu, vides apstākļu uzraudzību, kāpuru noteikšanu un atdalīšanu vai kukaiņu barošanu ar īpašām automātiskām uz robotiem balstītām procedūrām. Projekts ir vērsts uz sadarbības vides izveidi, kurā cilvēki un roboti harmoniski dalīsies un vienlaikus veiks dažādus apstrādes un manipulācijas uzdevumus. Paredzētā sistēma nodrošinās universālu risinājumu, ko var viegli pielāgot dažādām kukaiņu sugām.
Jaunā infrastruktūra tiks prototipu veidā ieviesta, testēta un apstiprināta, lai pārbaudītu atbilstību gala lietotāju prasībām. Tā tiks testēta ar trim dažādām izplatītām sugām.
Robotnik uzdevums šajā projektā ir izstrādāt, attīstīt un ieviest autonomu stacionāru robotizētu risinājumu, kura uzdevums ir iekraut un izkraut kastes no konveijera lentes. Visa sistēma tiks izvietota robotizētā kamerā. Robotam jāspēj veikt manipulācijas uzdevumus cilvēku tiešā tuvumā. Galaproduktam jābūt pēc būtības drošam, efektīvam mainīgā un dinamiskā vidē, un tajā jāintegrē cilvēkam pielāgotas robotizētas navigācijas un manipulācijas sistēmas.
Lai sasniegtu mērķus, Robotnik izstrādās un integrēs universālu spēka adaptīvu kontrolieri, lai droši apstrādātu kastes manipulāciju uzdevumu laikā, ir nepieciešama augsta precizitāte un liels griezes moments, lai droši apstrādātu kastes, kas piepildītas ar augsni un kukaiņiem. Lai nodrošinātu pareizu kastu lokalizāciju, Robotnik pielāgos savu esošo programmatūru ar uz redzes bāzētu objektu pārvietošanas sistēmu. Jaunākie satvērēji tiks testēti izvēlētajā robotizētajā rokā, lai nodrošinātu vislabāko veiktspēju.
Galvenais mērķis ir nodrošināt drošu cilvēka un robota sadarbību, vienlaikus neietekmējot sistēmas kopējo veiktspēju un produktivitāti. Robotnik sniegs ieguldījumu drošības robota plānotāja izstrādē, kura mērķis ir pārvaldīt robota uzdevumus, nodrošinot drošu izpildi. Plānošanas sistēmā tiks izmantota informācija, ko ģenerē robota sensori, kā arī zināma informācija par cilvēka pozīciju un kustībām.
Robotnik roboti ir aprīkoti ar modernāko aparatūru un programmatūru, lai nodrošinātu atbilstību jaunākajiem drošības standartiem.
Smidzināšanas un ravēšanas roboti
Izmantojot nezāļu attēlu datubāzes, šie uzņēmumi apmāca savus robotus, lai tie atklātu un nopļautu nezāles vai lietotu pesticīdus tieši uz nezāles nevis auga.
Tā kā aizvien vairāk nezāļu kļūst rezistentas pret pesticīdiem un to kopējās izmaksas un izmantošana ir augsta (lēš, ka katru gadu tiek izlietoti 3 miljardi mārciņu herbicīdu, kas izmaksā 25 miljardus ASV dolāru), šī tehnoloģija varētu būt milzīgs ieguvums gan lauksaimniekiem, gan videi.
Augļu novākšanas robotika
Ražas novākšana 24/7 ar robotizētām rokām.
Kultūras, kuru ražas novākšana ar robotiem jau uzsākta, ir zemenes, gurķi un augļu dārzi, piemēram, āboli.
ASV 2016. gadā vien ar rokām tika novāktas vairāk nekā 7 miljoni tonnu ābolu. Stundas alga par šo sarežģīto darbu turpina pieaugt, un darbaspēka trūkums ir reāla problēma. Šajās inovāciju iekārtās izmanto attēlu apstrādes un robotizētu roku kombināciju, lai noteiktu, ko novākt. Kvalitātes kontroli un augļu šķirošanu var veikt vienā operācijā, tādējādi samazinot atkārtotu darbu skaitu. Ražas datu analīze var būt noderīga, nosakot uzņēmuma ieņēmumus un organizējot iepakošanas un pārstrādes operācijas.
Ražas novākšana siltumnīcā
Izmantojot dažāda veida kameras, sensorus, skenerus savienojamībā ar robotiku, sāk parādīties jaunas ražas novākšanas sistēmas tādām augstvērtīgām kultūrām kā tomāti un zemenes.
Ražas novākšanas roboti spēj pārvietoties pa siltumnīcu ejām, precīzi identificēt nogatavojušos un nenogatavojušos augus, novākt to ražu un ievietot tos iebūvētajās kastu sistēmās.
Siltumnīcu materiālu pārkraušana
Roboti, kas droši strādā kopā ar cilvēkiem, var veikt tādus grūtus roku darba uzdevumus kā augu izvietošana.
Roboti var arī uzlabot augu kvalitāti, optimizējot augu izvietojumu un samazinot ar darbu nesaistītās ražošanas izmaksas, tostarp samazinot ūdens, pesticīdu, herbicīdu un minerālmēslu patēriņu, jo attālumi ir vienmērīgāki.
Avots: https://www.postscapes.com/agriculture-robots/
Lauksaimniecībā jau daudzus gadus tiek izmantotas autonomās tehnoloģijas. Slaukšanas roboti tagad ir ierasta parādība, un 2015. gadā tie veidoja 30% no visām jaunajām iekārtām Apvienotajā Karalistē (Heyden, 2015). Tajā pašā laikā robotizētus slaukšanas aparātus bija ieviesuši 5% Apvienotās Karalistes saimniecību (ibid.).
Satelītnavigācija un mēslojuma un sēklu izkliedēšana ar mainīgu mēslojuma un sēklu devu, kā arī ķīmiskā smidzināšana, izmantojot “zaļo uz brūno” (smidzina tikai zaļās nezāles, kas identificētas stiebrzālēs) vai, vēl vēlāk, “zaļo uz zaļo” (identificē mērķa nezāļu sugas zāles pļavās), ir sasniegumi, kas balstīti uz esošajām mašīnu platformām, kuras audzētājiem ir ērtas, jo tās tiek uzskatītas par pazīstamām.
Pāreja uz nākamo robotikas un autonomijas līmeni ir solis, kas lielākajai daļai audzētāju vēl nav sperts, jo ieviešanas šķēršļi ir integrācija, izmaksas un prasmes, kas kavē to ieviešanu. Neraugoties uz to, agrotehnoloģiju izstrādātāji vēlas attīstīt savu produktu iespējas, mācoties no audzētāju pieredzes un mijiedarbības un pārvarot šos šķēršļus.
Viens no galvenajiem iemesliem, kas kavē robotikas ieviešanu, ir darbaspēka pieejamība – gan sezonāla, gan pilna laika, ņemot vērā pieaugošo algu spiedienu un konkurenci no citām ekonomikas nozarēm. Tas ir īpaši redzams dārzkopības nozarē, kur daudzās darbībās joprojām ir nepieciešams liels cilvēku skaits.
Tiek radīts plašs alternatīvu robotikas risinājumu klāsts, kurus var iedalīt dažādos veidos:
Lielās autonomās platformas, kas veic tādas pašas funkcijas kā parastās traktortehnikas un agregātu kombinācijas, bet bez vadītāja, piemēram, John Deere un CNH platformas, kā arī mazāki AgXeed piedāvājumi. TAFE izstrādā autonomu elektropiedziņas traktoru, bet Hands-Free Farm Harpera Adamsa universitātes pētniecības projektu laikā pārveido parastos Iseki traktorus par autonomiem, abiem pielāgojot parasti mazāku tehniku.
Izpētot stresa (karstuma, kaitēkļu, slimību vai nezāļu) gadījumus, vairāki uzņēmumi ir izstrādājuši kombinētus vai autonomus risinājumus. Uzņēmumi arī pēta, kā uzstādīt sensorus uz robotizētām platformām, lai iegūtu reprezentatīvākus datus no kaitēkļu un sporu slazdiem, kas pašlaik tiek atstāti vienā pozīcijā laukā.
Nezāļu ravēšana, piemēram, Small Robot Company kombinētais risinājums, kurā izmanto divus atsevišķus robotus – vienu, lai kartētu lauku, un otru, lai apstrādātu to ar zemas jaudas lāzeriem. Atsevišķi NAIO, BAKUS un BAKUS risinājumi izmanto mašīnredzes un mākslīgā intelekta tehnoloģijas, lai identificētu un kultivētu nezāles, savukārt Earthrover izmanto gaismas sistēmas kontrolei. FarmDroid darbojas citādi, jo tas sēj kultūraugus un kartē precīzu atrašanās vietu, lai pēc iestādīšanas varētu atgriezties un appļaut nezāles ap augiem. Nissan ir izstrādājis Duckrobot, kas peld rīsu laukā un likvidē nezāles.
Augļu dārzu apsmidzināšana iespējama ar GUSS robotizēto platformu, kas ir tieša traktora un vadītāja aizstājēja. Roboti, kas spēj identificēt kaitēkļus un slimības, izmantojot mākslīgo intelektu un operatīvu apstrādi, ļaus apstrādāt inficētās vietas nevis visu sējumu, tādējādi ietaupot ievērojamas izmaksas par agroķīmiskajiem līdzekļiem, kā arī būs ilgtspējīgāki vides ziņā.
Antobot izstrādā ražas izpēti, lai saskaitītu augļu skaitu augļu dārzos un zemeņu tuneļos, novērtētu augļu gatavību un ražu, sniedzot datus, kas noder personāla nodrošināšanai ar resursiem un precīzai produkcijas prognozēšanai tirdzniecības kooperatīviem un mazumtirdzniecības piegādes ķēdēm.
Augsnes paraugu ņemšana, izmantojot E-Nano un GMV NSL robotizētās platformas, ļaus iegūt daudz detalizētāku informāciju par augsnes barības vielu stāvokli un iespējamo organisko vielu saturu. Precīzi kartējot lauku, robots pēc vairākiem gadiem var atgriezties tajā pašā vietā un atkal ņemt paraugus, lai noskaidrotu, kā reģeneratīvās apsaimniekošanas prakse ir uzlabojusi augsnes veselību.
Ražas novākšana, iespējams, ir visgrūtāk atrisināmā joma, bet audzētājiem tā ir arī vislielākā vajadzība ietaupīt darbaspēka ieguldījumu. Tā varētu būt augļu koku novākšana ar Tevel, Octinion, Agrobot un RootAI izstrādājumiem, mīksto augļu novākšana ar SAGA, Dogtooth un Field Robotics, sparģeļu novākšana ar Muddy Machines un brokoļu novākšana ar Earthrover. Pašlaik datorizētās apstrādes jaudas pakāpe, kas nepieciešama, lai atdarinātu cilvēka roku un acu koordināciju, nozīmē, ka visas platformas ir lēnas, salīdzinot ar esošajiem novācējiem, un tām ir nepieciešama turpmāka attīstība un pilnveidošana, pirms tās kļūs līdzvērtīgas un tiks uzskatītas par dzīvotspējīgu alternatīvu pieredzējušiem novācējiem.
Tomēr joma, kas tiek uzskatīta par patiesi darbietilpīgu, ir BurroAI, Antobot un Fox Robotics izstrādātās loģistikas platformas, kurās novāktos augļus roboti pārvieto pa plantāciju, nogādā centrālajā punktā un atgriežas ražas novākšanas vietā ar tukšiem paliktņiem. Tas novērš vajadzību pēc ražas novākšanas personāla, kas nogādā augļus uz centrālo punktu un ļauj viņiem darīt to, ko viņi dara vislabāk, proti, turpināt novākt augļus, tādējādi maksimāli izmantojot pieejamo darbaspēku.
Automatizācijai un robotizācijai nākotnē būs plaša ietekme uz lauksaimniecības un dārzkopības nozari, aizstājot cilvēkus smagu darbu veikšanā un vienlaikus radot augstāk kvalificētas darba vietas, kas būs pievilcīgas dažādiem cilvēkiem. Datu uztveršana un apstrāde ļaus audzētājiem iegūt daudz labāku pārskatu par augošajām kultūrām, nodrošinot informāciju, kas ļaus pieņemt labākus lēmumus par mērķtiecīgu apūdeņošanas, mēslošanas, agroķīmisko līdzekļu un darbaspēka resursu intervenci. Tas uzlabos finansiālo un vides aizsardzību lauku saimniecībās un palīdzēs virzīties uz lauksaimniecības nozari ar nulles neto vērtību.
Avots: https://agri-epicentre.com/blog/autonomous-and-robotics-solutions-for-agriculture-and-horticulture/
Pēteris Zelčs,
LLKC Inženiertehniskās nodaļas lauksaimniecības/mehānikas inženieris